Průvodce používáním PIC16F877A pro projekty krokového motoru
Mikrokontrolér PIC16F877A se široce používá v mnoha elektronických projektech, protože nabízí dobrou rovnováhu funkcí a snadného použití.V této příručce se podrobně podíváme na PIC16F877A, pokrýváme vše od jeho modelů ANINOUT a CAD až po jeho použití při ovládání krokových motorů.Ať už stavíte jednoduché zařízení nebo komplexní automatizační projekt, porozumění tomu, jak připojit a ovládat motory pomocí tohoto mikrokontroléru, vám pomůže dosáhnout nejlepších výsledků.
Katalog

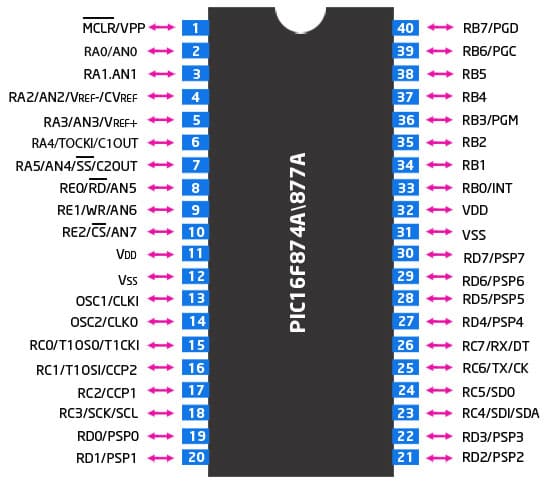
Konfigurace PIC16F877A PIN
Modely CAD pro PIC16F877A
PIC16F877A Schéma symbolu
PIC16F877A PCB Footprint

3D model
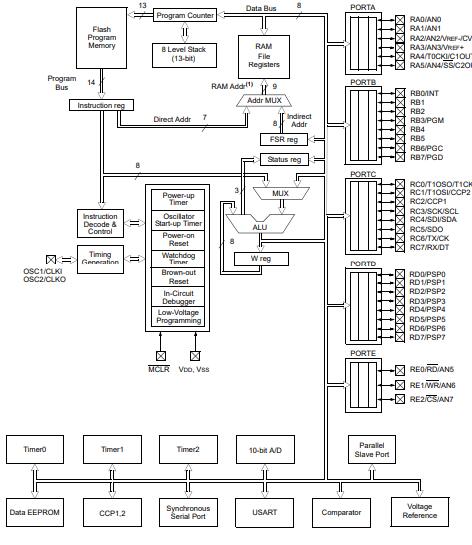
Vnitřní struktura PIC16F877A
Podrobné technické specifikace
| Typ | Parametr |
| Časová doba z továrny | 7 týdnů |
| Mount | Skrz díru |
| Typ montáže | Skrz díru |
| Balíček / pouzdro | 40-dip (0,600, 15,24 mm) |
| Počet kolíků | 40 |
| Převaděče dat | A/D 8x10B |
| Počet I/OS | 33 |
| Časovače hlídacího psa | Ano |
| Provozní teplota | -40°C ~ 85°C ta |
| Obal | Trubice |
| Série | Pic® 16f |
| Publikováno | 1997 |
| JESD-609 kód | E3 |
| Kód PBFree | Ano |
| Stav dílu | Aktivní |
| Úroveň citlivosti na vlhkost (MSL) | 1 (neomezený) |
| Počet zakončení | 40 |
| ECCN kód | Ear99 |
| Terminál povrch | Matte Tin (SN) - žíhaná |
| Další funkce | Pracuje s minimálním dodávkou 4V |
| Poloha terminálu | DVOJÍ |
| Napětí | 5V |
| Frekvence | 20MHz |
| Číslo základní dílu | PIC16F877A |
| Počet špendlíků | 40 |
| Přívodní napětí max (VSup) | 5,5 V |
| Napájecí zdroje | 5V |
| Přívodní napěťový min (VSup) | 4,5V |
| Rozhraní | I2C, SPI, SSP, UART, USART |
| Velikost paměti | 14 kB |
| Typ oscilátoru | Externí |
| Nominální dodávka proudu | 1,6 mA |
| Velikost RAM | 368 x 8 |
| Napětí - napájení (VCC/VDD) | 4V ~ 5,5 V. |
| UPS/UCS/periferní ICS typ | MicroController, RISC |
| Základní procesor | Pic |
| Periferie | Brown-Out Detect/Reset, Por, PWM, WDT |
| Typ programové paměti | BLIKAT |
| Velikost jádra | 8-bit |
| Velikost paměti programu | 14 kB (8k x 14) |
| Připojení | I2C, SPI, UART/USART |
| Bitová velikost | 8 |
| Čas přístupu | 20 µs |
| Má ADC | Ano |
| DMA kanály | Žádný |
| Šířka datové sběrnice | 8b |
| Počet časovačů/čítačů | 3 |
| Šířka autobusu | 8b |
| Hustota | 112 KB |
| Velikost EEPROM | 256 x 8 |
| Rodina CPU | Pic |
| Počet kanálů ADC | 8 |
| Počet kanálů PWM | 2 |
| Počet kanálů I2C | 1 |
| Výška | 4,06 mm |
| Délka | 52,45 mm |
| Šířka | 14,22 mm |
| Dosáhnout SVHC | Ne SVHC |
| Kalení záření | Žádný |
| Stav ROHS | Rohs3 vyhovující |
| Olovo zdarma | Olovo zdarma |
Porozumění krokovým motorům
Krokový motor je typ elektrického motoru, který se pohybuje spíše v konkrétních krocích než v nepřetržitém pohybu, jako jsou tradiční motory.Tyto krok za krokem se měří ve stupních, které se mohou lišit v závislosti na aplikaci.
Krokové motory mohou pracovat v různých režimech: vlnová pohon, plná pohon a polovina jízdy.Každý režim řídí, jak jsou fáze motoru pod napětím, ovlivňují jeho výkon a způsobují, že je vhodný pro různá použití.
V režimu pohonu vlny je najednou napájena pouze jedna fáze motoru.Tento jednoduchý režim řízení je užitečný pro situace, kdy je energetická účinnost upřednostňována před točivým momentem, například v základních automatizačních úkolech, kde je potřeba minimální počáteční proud.
Režim s plným pohonem poháněl dvě fáze současně.To má za následek vyšší výkon točivého momentu, protože dvě cívky fungují společně, což je ideální pro aplikace, kde je potřeba přesnost a síla, například v robotice a stroji CNC.
Režim poloviny pohonu kombinuje vlastnosti vlny i plného pohonu střídavě energizací jedné fáze a dvou fází.Tento přístup poskytuje menší velikosti kroků a účinně zdvojnásobí rozlišení motoru.Polovina jízdy je nejvhodnější pro aplikace, jako je 3D tisk a jemné instrumentace, kde je nezbytné hladké pohyb a přesné umístění.
Při výběru krokového motoru pro specifické použití zvažte provozní prostředí.Pro úkoly s vysokou přesností se doporučuje režim poloviny pohonu, aby se zajistily hladké přechody a snížené vibrace.U projektů zaměřených na úspory energie může být vhodnější režim vlny.
Výběr správného režimu vyžaduje vyrovnávací faktory, jako je točivý moment, rychlost a složitost systému.Výběr správného režimu může významně ovlivnit výkon motoru a celkovou účinnost vašeho systému.
Připojení krokového motoru s PIC16F877A
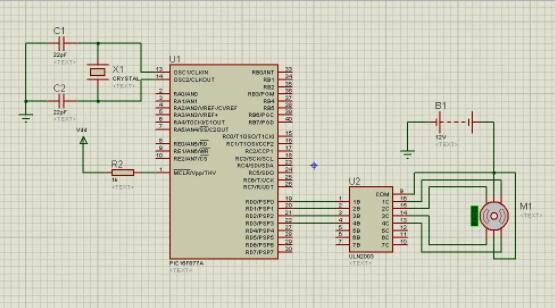
Pro připojení krokového motoru s PIC16F877A MicroController, můžete použít tranzistorové pole ULN2003.Tento integrovaný obvod, určený pro motory s vysokým torque, obsahuje sedm párů Darlingtonu.Dolní bity mikrokontroléru jsou spojeny se vstupními kolíky (1B, 2B, 3B, 4B) ULN2003, zatímco jeho výstupní kolíky (1C, 2C, 3C, 4C) se připojují k kolíkům na krokovou motor.Společné kolíky motoru a COM PIN ULN2003 jsou připojeny k napájení 12V.
Křezové motory se běžně používají pro aplikace, které vyžadují přesné řízení pohybu.Převádějí digitální impulsy na mechanickou rotaci, takže jsou ideální pro zařízení, jako jsou stroje CNC a 3D tiskárny, kde musí být pečlivě regulována poloha a rychlost.
ULN2003 hraje klíčovou roli při ovládání krokových motorů kvůli jeho schopnosti zvládnout vysoký proud a snadné propojení s mikrokontroléry.Při připojení k PIC16F877A se k řízení krokového motoru používají dolní bity Portd.Tato konfigurace poskytuje přesné ovládání kroku a zajišťuje přesný pohyb a umístění.
Použití ULN2003 v nastavení řízení motoru je v aplikacích v reálném světě vysoce spolehlivé.Pomáhá minimalizovat problémy, jako jsou zmeškané kroky nebo nesprávné umístění, což zlepšuje celkový výkon.Pravidelná údržba a kalibrace na základě údajů o využití mohou dále optimalizovat funkci motoru a zajistit dlouhodobou stabilitu a přesný provoz.
Nastavení rychlosti motoru krokového motoru
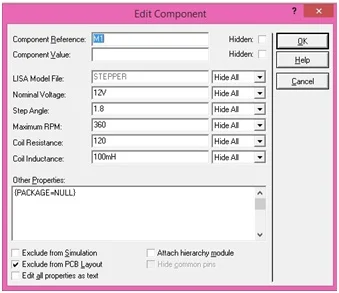
Rychlost krokového motoru může být přesně upravena pomocí softwaru pro simulaci Proteus.Přístupem k nastavení motoru prostřednictvím „Upravit vlastnosti“ lze provést úpravy parametrů, jako je počet kroků a úhel kroku.Například 200-krokový motor rozdělí plnou rotaci (360 °) na 200 kroků, což vykresluje každý krok 1,8 °.Změna těchto nastavení v Proteus se během simulace dynamicky odráží.
V praxi jsou krokové motory často používány v průmyslových odvětvích, kde je zásadní přesná kontrola pohybu, například v CNC strojích a robotice.Nastavení úhlu kroku a počtu kroků jemných dolarů motoru k dosažení přesného pohybu potřebného pro konkrétní úkoly.
Změna parametrů motoru krokového motoru ovlivňuje charakteristiky výkonu, jako je točivý moment a rozlišení.Například zvýšení počtu kroků obecně zvyšuje rozlišení, ale může ovlivnit točivý moment a dobu odezvy.Pochopení těchto kompromisů prostřednictvím simulace pomáhá při rozhodování.
Nuances perspektiva ukazuje, že iterativní úpravy, následované praktickými pokusy, vedou k robustnějšímu designu motoru.Zajištění toho, aby digitální simulace úzce zrcadly výsledky v reálném světě.Nuance na konfiguraci krokového motoru skutečně spočívají v ohrožení rovnováhy mezi teoretickou přesností a praktickou proveditelností.
Programování krokového motoru s PIC16F877A
Tato část zahrnuje, jak naprogramovat krokový motor pomocí mikrokontroléru PIC16F877A, vysvětluje různé režimy jízdy a poskytuje praktické pokyny pro efektivní implementaci.
Zde je základní příklad kódu pro demonstraci ovládání krokového motoru pomocí režimu plného pohonu:
void main ()
{
Trisd = 0b00000000;// Nastavit portd jako výstup
Portd = 0b111111111;// inicializace portd
dělat
{
Portd = 0b00000011;// energizujte dvě fáze současně
Delay_ms (500);// 0,5-sekundové zpoždění
Portd = 0b00000110;
Delay_ms (500);
Portd = 0b00001100;
Delay_ms (500);
Portd = 0b00001001;
Delay_ms (500);
} zatímco (1);// smyčka na neurčito
}
V tomto kódu je portd PIC16F877A nakonfigurován jako výstupní port pro ovládání krokového motoru přes ovladač ULN2003.Sekvence příkazů povzbuzuje dvě fáze krokového motoru najednou, což je charakteristické pro režim plného pohonu.Tento režim drží rotor v pevné poloze s maximálním točivým momentem, ale obvykle spotřebovává více energie.
Režim plného pohonu není jediný způsob, jak ovládat krokové motory.Režimy vlny a poloviční pohon poskytují alternativy na základě specifických požadavků.Vlnová pohon energizuje pouze jednu fázi najednou, což snižuje spotřebu energie, ale má za následek nižší točivý moment.Polovina jízdy se střídá mezi jednou a dvěma fázemi a nabízí vyšší rozlišení a plynulejší pohyb.
Při programování krokových motorů vyberte režim jízdy, který nejlépe vyhovuje vašim potřebám, ať už jde o přesné polohování, energetickou účinnost nebo maximální točivý moment.
Praktické aplikace krokových motorů
Stepper Motors se v mnoha průmyslových odvětvích široce používají kvůli jejich schopnosti poskytovat přesnou kontrolu a spolehlivý výkon.Díky jejich všestrannosti jsou vhodné pro vše od automobilů a domácích spotřebičů po průmyslové stroje a zdravotnické prostředky.
V automobilovém světě hrají krokové motory klíčovou roli při kontrole systémů, jako je škrticí klapka, světlomety a klimatizace.Pomáhají tyto komponenty doladit a zajistit, aby vozidla běžela hladce a efektivně.Mezitím v kancelářském vybavení, jako jsou tiskárny a kopíry, zpracovávají krokové motory úkoly, jako je napájení papíru a umístění inkoustu.Tato přesnost zajišťuje konzistentní kvalitu tisku a hladký provoz v průběhu času.
Doma se spotřebiče, jako jsou pračky a myčky nádobí, spoléhají na krokové motory při řízení toku vody a otáčení bubnu, což zajišťuje hladce fungovat.V průmyslových prostředích jsou krokové motory zásadní pro provoz CNC strojů a robotických zbraní, kde poskytují přesné pohyby potřebné pro vysoce přesnou výrobu.
Bezpečnostní systémy také těží ze spolehlivého pohybu krokových motorů.V zařízeních, jako jsou sledovací kamery a automatizované zámky, umožňují krokové motory hladké a přesné polohování, které je nezbytné pro efektivní monitorování a bezpečnost.Ve zdravotnictví se krokové motory používají ve zdravotnických prostředcích, jako jsou infuzní čerpadla a zobrazovací zařízení, kde nabízejí přesnou kontrolu nezbytnou pro bezpečný a přesný provoz.
Vzhledem k tomu, že se technologie neustále vyvíjí, očekává se, že krokové motory najdou ještě více aplikací v rozvíjejících se oborech, jako je robotika a autonomní vozidla.Jejich pokračující rozvoj pravděpodobně povede k ještě větší přesnosti a efektivitě a rozšíří jejich roli v různých průmyslových odvětvích.
Srovnatelné díly mikrokontroléru
| Číslo dílu | PIC16F877A-I/P. | PIC16F77-I/P. | PIC16F74-I/P. | PIC16F777-I/P. |
| Výrobce | Technologie mikročipů | Technologie mikročipů | Technologie mikročipů | Technologie mikročipů |
| Balíček / pouzdro | 40-dip (0,600, 15,24 mm) | 40-dip (0,600, 15,24 mm) | 40-dip (0,600, 15,24 mm) | 40-dip (0,600, 15,24 mm) |
| Počet kolíků | 40 | 40 | 40 | 40 |
| Šířka datové sběrnice | 8 b | 8 b | 8 b | 8 b |
| Počet I/O. | 33 | 33 | 33 | 36 |
| Rozhraní | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, UART, USART |
| Velikost paměti | 14 KB | 7 KB | 14 KB | 14 KB |
| Napětí | 5 v | 5 v | 5 v | 5 v |
| Periferie | Brown-Out Detect/Reset, Por, PWM, WDT | Brown-Out Detect/Reset, Por, PWM, WDT | Brown-Out Detect/Reset, Por, PWM, WDT | Brown-Out Detect/Reset, Por, PWM, WDT |
| Zobrazit porovnání | PIC16F877A-I/P. Vs. PIC16F77-I/P. | PIC16F877A-I/P. Vs. PIC16F77-I/P. | PIC16F877A-I/P. Vs. PIC16F74-I/P. | PIC16F877A-I/P. Vs. PIC16F777-I/P. |
Často kladené otázky [FAQ]
1. Co používá krokový motor k generování mechanického pohybu?
Krokový motor vytváří mechanický pohyb pomocí elektrických impulsů.
2. co dělá krokový motor?
Krokový motor se pohybuje v diskrétních krocích.
3. Jak se měří krokovou motory?
Krokové motory se měří ve stupních.
4. Kolik kroků podniká krokový motor?
Krokový motor se pohybuje o krok po druhém.
5. Kolik režimů excitací má krokový motor?
Krokový motor má tři excitační režimy.
6. Jaký je nejjednodušší způsob, jak připojit krokový motor?
Nejjednodušším způsobem je připojit jej k mikrokontroléru PIC16F877A.
7. Kolik vstupních kolíků ULN2003 je spojeno s nejnižšími významnými bity portd mikrokontroléru?
Čtyři vstupní kolíky jsou spojeny s nejnižšími významnými kousky portd mikrokontroléru
O nás
ALLELCO LIMITED
Přečtěte si více
Rychlý dotaz
Zašlete prosím dotaz, budeme odpovědět okamžitě.
Proč si pro svůj projekt vybrat paměťový čip Adesto RM25C64DS-Ltai-B?
na 2024/10/10
PC817 OPTOCOUPLER: Funkčnost a moderní aplikace
na 2024/10/10
Populární příspěvky
-
Co je GND v obvodu?
na 1970/01/1 2838
-

Průvodce konektorem RJ-45: barevné kódy konektoru RJ-45, schémata zapojení, aplikace R-J45, datové listy RJ-45
na 1970/01/1 2410
-

Typy konektoru vláken: SC vs LC a LC vs MTP
na 1970/01/1 2019
-
Porozumění napětí napájení v elektronice VCC, VDD, VEE, VSS a GND
na 0400/11/5 1766
-

Porovnání mezi DB9 a RS232
na 1970/01/1 1726
-

Co je to baterie LR44?
Elektřina, ta všudypřítomná síla, tiše prostupuje každý aspekt našeho každodenního života, od triviálních gadgetů po život ohrožující lékařské vybavení, hraje tichou roli.Skutečně uchopit tuto energii, zejména to, jak ji ukládat a efektivně ji vydávat, není snadný úkol.Na tomto pozadí se tento článek zaměří na typ baterie mincí, která se může zdát na pov...na 1970/01/1 1679
-
Porozumění základy: odolnost proti indukčnosti a kapacitance
Ve složitém tanci elektrotechniky se trojice základních prvků zabírá v centru pozornosti: indukčnost, odpor a kapacita.Každý nese jedinečné rysy, které diktují dynamické rytmy elektronických obvodů.Zde se vydáme na cestu, abychom dešifrovali složitost těchto komponent, abychom odhalili jejich odlišné role a praktické použití v obrovském elektrickém orchestru.Indukčnost...na 1970/01/1 1621
-

CR2430 Baterie Komplexní příručka: Specifikace, aplikace a srovnání s bateriemi CR2032
Co je baterie CR2430?Výhody baterií CR2430NormaAplikace baterie CR2430CR2430 EkvivalentCR2430 vs CR2032Velikost baterie CR2430Co hledat při nákupu CR2430 a ekvivalentůDatový list PDFČasto kladené otázky Baterie jsou srdcem malých elektronických zařízení.Mezi mnoha dostupnými typy hrají mincovské buňky klíčovou roli, běžně se vyskytují v kalkulačkách, dálkovém ovladači ...na 1970/01/1 1495
-

CR2450 vs CR2032: Lze místo toho použít baterii?
Lithium manganové baterie mají určité podobnosti s jinými lithiovými bateriemi.Vysoká hustota energie a dlouhá životnost jsou vlastnosti, které mají společné.Tento druh baterie získal důvěru a laskavost mnoha spotřebitelů kvůli své jedinečné bezpečnosti.Drahé technologické gadgety?Malé spotřebiče v našich domovech?Rozhlédněte se a uvidíte je všude.Mezi tyto lithium...na 1970/01/1 1471
-
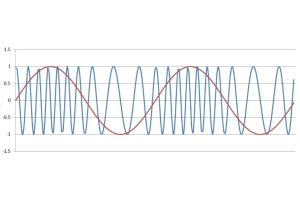
Co je RF a proč ho používáme?
Technologie rádiové frekvence (RF) je klíčovou součástí moderní bezdrátové komunikace, což umožňuje přenos dat na velké vzdálenosti bez fyzických připojení.Tento článek se ponoří do základů RF a vysvětluje, jak elektromagnetické záření (EMR) umožňuje RF komunikaci.Prozkoumáme principy EMR, vytvoření a kontrolu signálů RF a jejich rozsáhlé použití.Článek s...na 1970/01/1 1454
Horké číslo dílu
-
SN74LV244ARGYR
Texas Instruments
IC BUF NON-INVERT 5.5V 20VQFN
MPC8548ECVTAUJB
NXP USA Inc.
IC MPU MPC85XX 1.333GHZ 783BGA
EP20K400EBC652-3N
Intel
IC FPGA 488 I/O 652BGA
R5F100LCAFB#V0
Renesas Electronics America Inc
IC MCU 16BIT 32KB FLASH 64LQFP
BFL4037-1E
onsemi
MOSFET N-CH 500V 11A TO220F-3FS
71600-014LF
Amphenol ICC (FCI)
CONN RCPT 14P IDC 28-30AWG GOLD
BAV21WS-G RRG
Taiwan Semiconductor Corporation
DIODE GEN PURP 200V 200MA SOD323
STM32G030K8T6
STMicroelectronics
IC MCU 32BIT 64KB FLASH 32LQFP
ISL95818HRTZ-T
Renesas Electronics America Inc
IC REG CTRLR INTEL 1OUT 40TQFN
PAA190STR
IXYS Integrated Circuits Division
SSR RELAY SPST-NO 150MA 0-400V
SP3243EUCA-L
MaxLinear, Inc.
IC TRANSCEIVER FULL 3/5 28SSOP
LM4041CYM3-1.2-TR
Microchip Technology
IC VREF SHUNT 0.5% SOT23-3
IHLP2020BZER6R8M01
Vishay Dale
FIXED IND 6.8UH 2.4A 150MOHM SMD
41206ESDA-TR1
Eaton - Electronics Division
TVS DEVICE POLYMER 35V 1206
MC74HC4075FL1
onsemi
IC GATE OR 3CH 3-INP SOEIAJ-14
TL16C554AFN
Texas Instruments
IC QUAD UART W/FIFO 68-PLCC
2N1792
Powerex Inc.
SCR 50V 110A TO94
NJU7016D
Nisshinbo Micro Devices Inc.
IC CMOS 2 CIRCUIT 8DIP -

TFZTR9.1B
Rohm Semiconductor
DIODE ZENER 9.1V 500MW TUMD2
SE2425U-R
Skyworks Solutions Inc.
IC AMP BLUETOOTH 2.4GHZ 16QFN
SL28SRC01BZIT
Skyworks Solutions Inc.
IC CLOCK PCIE GEN3/2 DIF 16TSSOP
ISL6615CRZ-T
Renesas Electronics America Inc
IC GATE DRVR HALF-BRIDGE 10DFN
TL2842DR
Texas Instruments
IC REG CTRLR BST FLYBK CM 14SOIC
PEB8091HDV1.1
Infineon Technologies
NETWORK TERMINATION CONTROLLER
TLV431BQDCKR
Texas Instruments
IC VREF SHUNT ADJ 0.5% SC70-6
OPA2180IDGKR
Texas Instruments
IC OPAMP ZERO-DRIFT 2CIRC 8VSSOP
PCM3000E
Texas Instruments
IC AUDIO CODEC 18-BIT 28-SSOP
GRT21BR61H225ME13L
Murata Electronics
CAP CER 2.2UF 50V X5R 0805
AT32UC3C2512C-Z2ZR
Microchip Technology
IC MCU 32BIT 512KB FLASH 64QFN
GRM0335C1E2R1BA01D
Murata Electronics
CAP CER 2.1PF 25V C0G/NP0 0201
UWX1C220MCL1GB
Nichicon
CAP ALUM 22UF 20% 16V SMD
LH28F320S3NS-L11
Sharp Microelectronics
IC FLASH 32M PARALLEL 56SSOP
DFA150AA80
SanRex Corporation
DIODE MODULE 800V 150A
PHDR-28VS
JST Sales America Inc.
CONN RCPT HSG 28POS 2.00MM
1808SA101MAT3A
KYOCERA AVX
CAP CER 100PF 1.5KV C0G/NP0 1808
MAX761ESA+T
Analog Devices Inc./Maxim Integrated
IC REG BOOST ADJ/12V 1.5A 8SOIC -

S-8358B53MC-NRMT2G
ABLIC Inc.
IC REG CTRLR BOOST SOT23-5
GCM1885C1H151FA16J
Murata Electronics
CAP CER 150PF 50V C0G 0603
LP2975IMMX-3.3
Texas Instruments
IC LNR REG CTRLR 1OUT 8VSSOP
AS1105WL
ams OSRAM
IC DRVR 7 SEGMNT 4 DIGIT 20SOIC
OPA4314AQPWRQ1
Texas Instruments
IC OPAMP GP 1 CIRCUIT 14TSSOP
AC0402KRX7R7BB683
YAGEO
CAP CER 0.068UF 16V X7R 0402
MI-J71-IZ
Vicor Corporation
DC DC CONVERTER 12V 25W
5CSEBA6U23I7N
Intel
IC SOC CORTEX-A9 800MHZ 672UBGA
VO4156H-X006
Vishay / Semiconductor - Opto Division
OPTOISOLATOR 5.3KV TRIAC 6DIP
AD9517-1ABCPZ
Analog Devices Inc.
IC CLOCK GENERATOR 48LFCSP
T491D157M006AT
KEMET
CAP TANT 150UF 20% 6.3V 2917
5CSEMA5F31I7N
Intel
IC SOC CORTEX-A9 800MHZ 896FBGA
SKY65903-11
Skyworks Solutions Inc.
GPS LNA WITH PRE & POST FILTER
SD103BWS-7-F
Diodes Incorporated
DIODE SCHOTTKY 30V 350MA SOD323
EP1S40F1020I6N
Intel
IC FPGA 773 I/O 1020FBGA
ATXMEGA16D4-MH
Microchip Technology
IC MCU 8/16BIT 16KB FLASH 44VQFN
BZT52H-B56,115
Nexperia USA Inc.
DIODE ZENER 56V 375MW SOD123F
F950G227MSAAQ2
KYOCERA AVX
CAP TANT 220UF 20% 4V 1206