TB6600HG Ovladač motoru: Specifikace, funkce a aplikace
Katalog
TB6600HG Popis

TB6600HG je typ PWM vrtulníkem s jedním čipem bipolárního sinusoidálního motorového ovladače mikrosteppingu.Může dosáhnout dopředu a zpětného rotace prostřednictvím 2-fázových, 1-2-fází, W1-2-fáze, 2W1-2-fáze a 4W1-2-fázové excitační režimy.2-fázové bipolární krokové motory jsou poháněny výhradně nízkou vibrační signál s vysokou účinností.
Alternativy a ekvivalenty:
• • BD6290EFV-E2
• • TB6600FG
• • TB67S128FTG
• • L6258EX
Specifikace TB6600HG
• Stav dílu: Aktivní
• Balení: zásobník
• Balíček / pouzdro: HZIP-25
• Výrobce: Toshiba
• Provozní dodavatelský proud: 4,2 Ma
• Provozní zásobovací napětí: 2 V až 5,5 V
• Hodnocení napětí: 8 V až 42 V
• Počet výstupů: 2 výstupy
• PD - rozptyl napájení: 40 W
• Montážní styl: skrz díru
• Délka balíčku/šířka/výška: 29,3 mm (max)/4,5 mm/15,7 mm
• Kategorie produktu: Řadiče a ovladače motoru / pohybu / zapalování
Provozní podmínky TB6600HG
(TA = -30 ° C až 85 ° C)
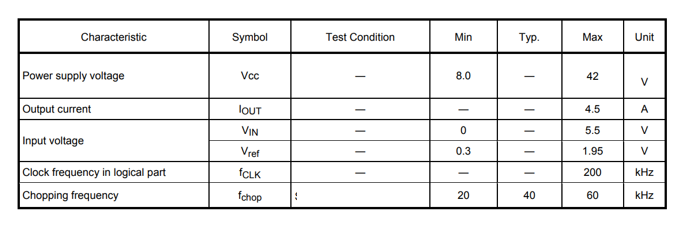
Poznámka: Dva terminály VCC by měly být naprogramovány stejné napětí.Maximální proud provozního rozsahu nelze nutně provádět v závislosti na různých podmínkách, protože výstupní proud je omezen pomocí disipace výkonu PD.Nezapomeňte se vyhnout použití IC ve stavu, který by způsobil, že teplota překročí TJ (avg.) = 107 ° C.
Napětí napájení 42 V a výstupní proud 4,5a jsou maximální hodnoty provozního rozsahu.Navrhněte prosím obvod s dostatečným snižováním v tomto rozsahu zvážením změny napájení, vnějšího odporu a elektrických charakteristik IC.V případě překročení napájecího napětí 42 V a výstupního proudu 4,5 A nebude IC normálně fungovat.
Jak připojit TB6600HG k řídicímu systému?
Napájení: Nejprve nezapomeňte poskytnout vhodné napájení TB6600HG.Při napájení TB6600HG obvykle musíte připojit dva kolíky: VCC (pozitivní napájecí zdroj) a GND (zemnící drát).Pin VCC je zodpovědný za poskytnutí napětí potřebného k pohonu čipu, zatímco pin GND slouží jako referenční úroveň.Musíme zajistit, aby zdroj napájení byl stabilní a splňoval specifikace TB6600HG.
Připojení signálu: Podle specifických potřeb řídicího systému musíme připojit řídicí signál s odpovídajícím kolíkem čipu ovladače TB6600HG.Tyto kontrolní signály obvykle zahrnují kontrolní signály směru a signály Step Pulse atd., Které jsou zodpovědné za poučení, jak motor působí, včetně směru rotace a rychlosti rotace.
Připojení motoru: Při připojení motoru k čipu ovladače TB6600HG musíme být obzvláště opatrní.Dva dráty motoru, obvykle červené a černé, představují pozitivní a negativní póly motoru.Červený vodič se obvykle připojuje k kladnému terminálu motoru, zatímco černý vodič se připojuje k zápornému terminálu.
Připojení zpětné vazby (volitelné): Pokud se pro řízení zpětné vazby používá kodér, musíme také připojit výstupní signál kodéru k řídicímu systému.To obvykle zahrnuje výstupy fáze A, fáze B a fáze Z (pokud je k dispozici).
Uzemnění: Musíme zajistit, aby byl společný zemní vodič všech zařízení správně připojen, aby se zabránilo rušení a poškození.
Nastavení inicializace: Po dokončení připojení musíme inicializovat nastavení TB6600HG, abychom zajistili, že funguje správně.To může zahrnovat nastavení aktuálních limitů, režimůchitáků, atd.
Funkce produktu TB6600HG
• Přijměte zvětšený chladič pro dobrý rozptyl tepla
• Pokyny pro nastavení subdivize jsou vytištěny na zadní straně desky
• S výstupní funkcí ochrany zkratu, bez obav
• Přijměte vysokorychlostní optickou vazbu 6N37, abyste zajistili vysokou rychlost bez ztráty synchronizace
• Výstupní proud je nesledně nastavitelný, aby vyhovoval vašim různým potřebám aplikací
• Pomocí běžného vstupního režimu anody existují dva vstupní terminály, díky čemuž je zapojení pohodlnější
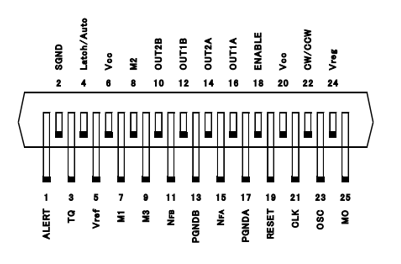
Konfigurace PIN TB6600HG
Funkce Popis TB6600HG
Nastavení excitace
Režim excitace lze vybrat z následujících osmi režimů pomocí vstupů M1, M2 a M3.Když jsou vstupy M1, M2 nebo M3 během provozu motoru posunuty, nový excitační režim iniciuje z počátečního režimu, což potenciálně narušuje kontinuitu výstupního proudu vlny.
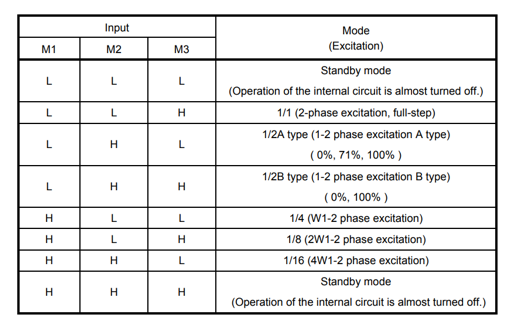
POZNÁMKA: Chcete -li změnit vzrušující režim změnou M1, M2 a M3, ujistěte se, že nestavte M1 = m2 = m3 = l nebo m1 = m2 = m3 = H.
Pohotovostní režim
Režim provozu se pohybuje do pohotovostního režimu za podmínky M1 = M2 = M3 = L nebo M1 = M2 = M3 = H. Spotřeba energie je minimalizována vypnutím všech operací, kromě ochrany operace.V pohotovostním režimu je výstupní terminál MO Hz.Režim pohotovostního režimu je uvolněn změnou stavu m1 = m2 = m3 = l a m1 = m2 = m3 = h do jiného stavu.Vstupní signál není po uvolnění pohotovostního režimu přijímán asi 200 μs.
Režim rozpadu
Nabíjení a vybíjení proudu v režimu PWM obvykle vyžaduje v OSCM asi pět cyklů.Režim rychlého rozpadu 40 procent je zahájen vyvoláním rozpadu v posledních dvou cyklech rychlého režimu rozpadu, přičemž poměr 40 procent zůstává trvale fixován.Vztah mezi frekvencí hlavních hodin (FMCLK), frekvencí OSCM (FOSCM) a frekvencí PWM (Fchop) je zobrazen následujícím způsobem:
foscm = 1/20 × fmclk
fchop = 1/100 × fmclk
Když rosc = 51KΩ, hlavní hodiny = 4MHz, OSCM = 200 kHz, frekvence PWM (FCchop) = 40 kHz.
Počáteční režim
Po použití reset jsou fázové proudy následující.
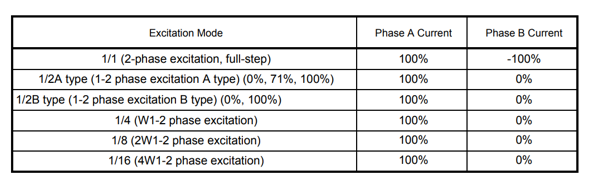
Aktuální směr je definován následovně.
Out1a → Out2a: Forward Direction
Out1b → Out2b: Směr vpřed
Aplikace TB6600HG
Níže jsou uvedeny některé aplikace TB6600HG.
• Ocasní světla
• Budovy pohostinství
• Velký venkovní LED displej
• Alternativa k skrytým světel
• Průmyslová světla s vysokým obsahem
• Velký formát LED podsvícení
• Zobrazit podsvícení LED
• Smartphony s podporou fotoaparátu
• Topologie odstupňovacího nebo odstupňovaného ovladače
Společné chyby a řešení TB6600HG
Následující uvádí některé běžné chyby ohledně TB6600HG a jejich řešení, které vám pomohou podniknout rychlé opatření při setkání s poruchami a chrání normální provoz zařízení.
Selhání jedna: Přehřátí čipu řidiče
Samotný čip TB6600HG je příliš horký, pravděpodobně kvůli nadměrnému zatížení nebo špatným podmínkám rozptylu tepla.
Řešení: Zlepšujte rozptyl tepla
Musíme přidat chladiče nebo ventilátory nebo ventilátory na čip řidiče a motoru, abychom zajistili, že mohou při práci plně rozptýlit teplo.Zároveň musíme udržovat prostředí kolem čipu řidiče a motoru dobře větrat, abychom se vyhnuli přehřátí.
Selhání dva: Motor se otáčí nesprávným směrem
Poté, co motor obdrží signál pohonu, směr rotace není v souladu s očekávaným, může být kontrolní signál nesprávný nebo že čip pohonu není správně nakonfigurován.
Řešení: Zkontrolujte řídicí signál
Musíme pečlivě zkontrolovat řídicí signály odeslané do TB6600HG, abychom zajistili, že správný signál řízení směru a signál pulsu.Pokud je k odesílání signálů použit mikrokontrolér, zkontrolujte prosím kód programu a konfiguraci PIN.
Selhání tři: Motor se nedokáže otáčet
Motor nereaguje po obdržení signálu pohonu, může se stát, že čip ovladače nefunguje správně nebo je problém s připojením mezi motorem a čipem ovladače.
Řešení: Zkontrolujte napájení a připojení
Musíme se ujistit, že napájecí zdroj TB6600HG je normální a spojení mezi motorem a čipem ovladače je pevné.Zkontrolujeme napětí a proud v obvodu pomocí multimetru, abychom se ujistili, že jsou v normálním rozmezí.
Selhání čtyři: vážné vytápění motoru
Motor generuje nadměrné teplo během provozu, což může být způsobeno nadměrným proudem nebo špatným rozptylem tepla.
Řešení: Upravte nastavení proudu
Pokud motor generuje vážné teplo, můžeme se pokusit snížit výstupní proud čipu ovladače.Nastavením proudového kolíku TB6600HG můžeme účinně omezit velikost výstupního proudu, což zase snižuje zátěž motoru a zajišťuje stabilní a bezpečný provoz motoru.
Často kladené otázky [FAQ]
1. Jaký je rozsah provozní teploty TB6600HG?
Provozní teplota TB6600Hg se pohybuje od -30 ° C do 85 ° C.
2. Co je TB6600HG?
TB6600HG je typ ovladače krokového motoru, který je navržen pro ovládání krokových motorů v různých aplikacích, jako jsou stroje CNC, 3D tiskárny, robotika a automatizační systémy.
3. Jaké jsou klíčové vlastnosti TB6600HG?
Mezi funkce TB6600HG patří nastavitelný proud motoru, nastavení rozlišení kroku, vestavěnou ochranu proti přehřátí a opto-izolované vstupy pro řízení signálu.