MPU-6050 v akci: Praktický průvodce nastavením, konfigurací a správou hluku
Katalog
Úvod do MPU-6050
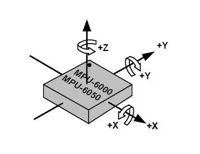
MPU-6050 je první integrovaná komponenta pro zpracování pohybu na světě, která integruje tříosý gyroskop, tříosý akcelerometr a škálovatelný digitální pohybový procesor (DMP).Účelem jeho použití je získat úhel sklonu objektu, který se má měřit (jako je kvadrokoptéra, vyrovnávací auto) na osách X, Y a Z, tj. Úhel rozteče, úhel role a úhel úhlu úhlu..Přečtěte jsme šest dat MPU-6050 (tříosé zrychlení AD hodnoty a tříosé hodnoty AD AD AD) prostřednictvím rozhraní I2C.Po zpracování fúze držení těla lze vypočítat úhly rozteče, role a naráže.Jako směrový odkaz na hodnoty měření je definice směru souřadnice senzoru znázorněna na obrázku níže, který se řídí principem souřadnicového systému (tj. Správný palec ukazuje na pozitivní směr X-Osa, indexový prst ukazuje na pozitivní směr osy y a prostřední prst ukazuje na pozitivní směr osy Z).
Díky své vyhrazené sběrnici I2C Sensor sběrnice je MPU-6050 schopen přijímat vstup přímo z externího 3-osmí kompasu a poskytuje úplný výstup 9-osy MotionFusion ™.Eliminuje problém nesouladu mezi kombinovaným gyroskopem a časovou osou akcelerátoru a významně snižuje balicí prostor ve srovnání s vícesložkovými řešeními.Při připojení k tříosému magnetometru je MPU-60X0 schopen poskytnout úplný výstup 9-osy pohybu do jeho hlavního portu I2C nebo SPI (všimněte si, že port SPI je k dispozici pouze na MPU-6000).
Alternativy a ekvivalenty
• • AIS328DQTR
• • ICM-20689
• MPU-3300
• • MPU-6000
• • MPU-6500
Výrobce MPU-6050
Výrobce MPU-6050 je TDK.Poté, co dva zakladatelé TDK, Dr. Yogoro Kato a Takei Takei, vynalezli Ferrite v Tokiu, založili Tokio Denkikagaku Kogyo K.K.V roce 1935. TDK jako značka globálního elektronického průmyslu vždy udržovala dominantní postavení v oblasti elektronických surovin a elektronických součástí.Portfolio produktu TDK a portfolio produktu TDK pokrývá pasivní komponenty, jako jsou keramické kondenzátory, hliníkové elektrolytické kondenzátory, filmové kondenzátory, magnetické produkty, vysokofrekvenční komponenty, piezoelektrické a ochranné zařízení, stejně jako senzory a senzorové systémy (jako je teplota a tlak, jako je teplota a tlak, jako je teplota a tlak, jako je teplota a tlak, jako je teplota a tlak, jako je teplota a senzorové systémy (jako je teplota a tlak, jako je teplota a tlak, jako je teplota a tlak, jako je teplota a tlak, jako je teplota a tlak, jako je teplota a tlak, jako je teplota a tlak, jako je teplota a senzorové systémy (Senzory magnetických a MEMS) atd. TDK navíc poskytuje napájecí zdroje a energetická zařízení, magnetické hlavy a další produkty.Mezi jeho značky produktů patří TDK, EPCOS, Invensense, Micronas, Tronics a TDK-Lambda.
Schéma interního bloku MPU-6050
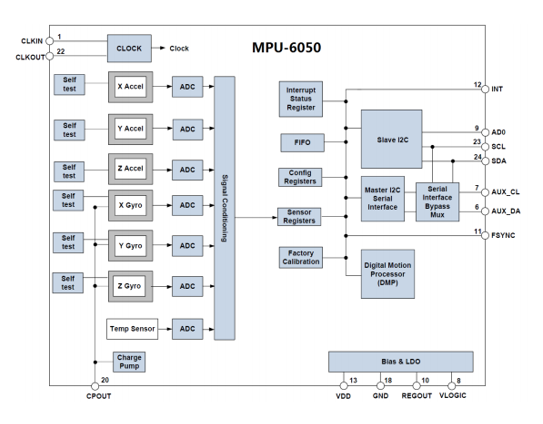
Mezi nimi jsou SCL a SDA rozhraní IIC připojená k MCU a MCU ovládá MPU-6050 prostřednictvím tohoto rozhraní IIC.K dispozici je také rozhraní IIC, jmenovitě AUX_CL a AUX_DA.Toto rozhraní lze použít k připojení externích slave zařízení, jako jsou magnetické senzory, za vzniku devítiosého senzoru.VLogic je napětí portu IO.Tento pin může podporovat minimálně 1,8 V.Obvykle jej připojujeme přímo k VDD.AD0 je kontrolní kolík adresy rozhraní Slave IIC (připojený k MCU).Tento PIN řídí nejnižší bit adresy IIC.Pokud je připojen k GND, IIC adresa MPU-6050 je 0x68;Pokud je připojen k VDD, je to 0x69.Vezměte prosím na vědomí, že zde adresa nezahrnuje nejnižší kousek přenosu dat (nejnižší bit se používá k reprezentaci operací čtení a zápisu).Na MWbalancedstc15 je AD0 připojen k GND, takže adresa IIC MPU-6050 je 0x68 (s výjimkou nejnižšího bit).
Inicializujte rozhraní IIC
MPU-6050 používá IIC ke komunikaci se STC15, takže musíme nejprve inicializovat datové linie SDA a SCL připojené k MPU-6050.
Resetujte MPU-6050
Tento krok obnovuje všechny registry uvnitř MPU-6050 na jejich výchozí hodnoty, čehož je dosaženo zápisem 1 až 7 registru správy napájení 1 (0x6b).Po resetu bude registr správy napájení obnoven na výchozí hodnotu (0x40) a tento registr musí být následně nastaven na 0x00, aby se probudil MPU-6050 a vložil do normálního pracovního stavu.
Nastavte rozsah plného měřítka senzoru úhlového rychlosti (GYRO) a zrychlení
V tomto kroku jsme nastavili rozsah v plném měřítku (FSR) dvou senzorů prostřednictvím konfiguračního registru gyroskopu (0x1b) a konfiguračním registru senzoru zrychlení (0x1c).Obvykle jsme nastavili rozsah gyroskopu v plném měřítku na ± 2000DP a rozsah plného měřítka akcelerometru na ± 2g.
Nastavte další parametry
Zde také musíme nakonfigurovat následující parametry: Vypněte přerušení, deaktivujte rozhraní AUX I2C, zakázat FIFO, nastavit rychlost vzorkování gyroskopu a nakonfigurovat digitální filtr Low-Pass (DLPF).Protože k čtení dat v této kapitole nepoužíváme přerušení, je třeba vypnout funkci přerušení.Současně, protože nepoužíváme rozhraní AUX I2C k připojení dalších externích senzorů, musíme také toto rozhraní zavřít.Tyto funkce lze ovládat prostřednictvím registru Enable Enable Enable (0x38) a Register ovládání uživatele (0x6a).MPU-6050 může použít FIFO k ukládání dat senzorů, ale v této kapitole jsme je nepoužili, takže všechny kanály FIFO je třeba uzavřít.To lze ovládat pomocí registru Enable FIFO (0x23).Ve výchozím nastavení je hodnota tohoto registru 0 (tj. FIFO je zakázána), takže můžeme použít výchozí hodnotu přímo.Rychlost vzorkování gyroskopu je řízena registru děliče vzorkování (0x19).Normálně jsme nastavili tuto vzorkovací frekvenci na 50. Konfigurace digitálního filtru Low-Pass (DLPF) je dokončena prostřednictvím registru konfigurace (0x1a).Obecně lze říci, že DLPF nastavíme na polovinu šířky pásma, abychom vyvážili přesnost dat a rychlost odezvy.
Nakonfigurujte zdroj systémových hodin a povolte senzor úhlového rychlosti a senzor zrychlení
Nastavení zdroje systémových hodin závisí na registru správy napájení 1 (0x6b), kde nejnižší tři bity tohoto registru určují výběr zdroje hodin.Ve výchozím nastavení jsou tyto tři bity nastaveny na 0, což znamená, že systém používá interní 8MHz RC oscilátor jako zdroj hodin.Abychom však zlepšili přesnost hodin, často ji nastavíme na 1 a jako zdroj hodin vybereme gyroskop-osy x.Kromě toho je také důležitým krokem v procesu inicializace povolení senzoru úhlové rychlosti a snímače zrychlení.Obě operace jsou implementovány prostřednictvím registru správy energie 2 (0x6c).Jednoduše nastavte odpovídající bit na 0 pro aktivaci odpovídajícího senzoru.Po dokončení výše uvedených kroků může MPU-6050 zadat normální pracovní stav.Tyto registry, které nejsou speciálně nastaveny, přijmou výchozí hodnoty přednastavenou systémem.
Jak funguje MPU-6050?
Senzor gyro
Senzor je vybaven gyrem uvnitř, který zůstane vždy rovnoběžný s počátečním směrem kvůli gyroskopickému účinku.Proto můžeme vypočítat směr a úhel rotace detekcí odchylky gyrového od počátečního směru.
Senzor akcelerometru
Senzor akcelerometru je zařízení, které může měřit zrychlení a funguje na základě principu piezoelektrického efektu.Během zrychlení senzor měří inerciální sílu aplikovanou na hmotnostní blok a poté vypočítá hodnotu zrychlení pomocí Newtonova druhého zákona.
Procesor digitálního pohybu (DMP)
DMP je modul zpracování dat v čipu MPU6050, který má vestavěný Kalman Filtring Algorithm pro získávání dat z gyroskopu a senzorů zrychlení a zpracování výstupních kvaternionů.Tato funkce výrazně snižuje pracovní zátěž periferního mikroprocesoru a vyhýbá se únavnému procesu filtrování a fúze dat.
Poznámky:
Quaternions: Quaternions jsou jednoduchá superkomplexní čísla.Složitá čísla jsou složena z reálných čísel plus imaginární jednotka I, kde i^2 = -1.
Kde se používá MPU-6050?
• Hračky
• sluchátko a přenosné hraní
• Herní ovladače založené na pohybu
• Technologie BlurFree ™ (pro stabilizaci videa/statického obrazu)
• Technologie AirSign ™ (pro zabezpečení/ověřování)
• InstantgetRedure ™ IG ™ Rozpoznávání gesta
• Nositelné senzory pro zdraví, fitness a sport
• Hra a aplikační rámec s podporou pohybu
• Technologie MotionCommand ™ (pro gesto zkratky)
• Služby založené na poloze, body zájmu a mrtvé zúčtování
• 3D dálkové ovládací prvky pro DTV a set-top boxů připojených k internetu, 3D myši
• Technologie Touchnanywhere ™ (pro ovládání/navigaci aplikací „bez dotyku“)
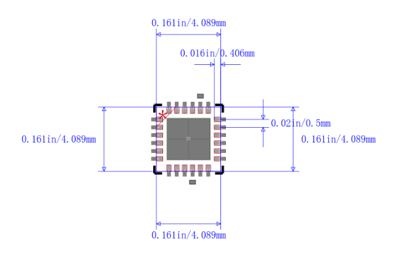
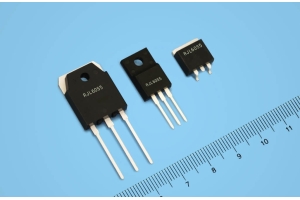
Balíček MPU-6050
Jak snížit hluk MPU-6050?
Můžeme vzít následující způsoby, jak snížit hluk MPU-6050:
Použijte kalibrované senzory: Kalibrace akcelerometru a gyroskopu MPU-6050 může eliminovat zkreslení a chybu samotných senzorů, čímž se snižuje účinek šumu.Proces kalibrace obvykle sestává ze dvou fází: statická kalibrace a kalibrace pohybu.
Hardwarový filtrování Proces: Přidání kondenzátorů filtru do elektrického vedení MPU-6050 může snížit dopad hluku napájení na senzor.Mezitím bychom se během rozvržení PCB měli pokusit udržet MPU-6050 od potenciálních zdrojů rušení, jako jsou vysokofrekvenční signální vedení a vysoce výkonné komponenty.
Zpracování softwaru: Po sběru prvotních dat z MPU-6050 můžeme přidat odkaz na filtrování softwaru pro předběžné zpracování počátečních dat, aby se eliminoval rušení vyvolané šumem.Mezi běžně používané metody filtrování softwaru zahrnují průměrné filtrování, střední filtrování, Kalman filtrování atd.
Použijte interní nízkoprůchodový filtr: MPU-6050 má interní integrovaný digitální nízkoprůchodový filtr, který lze použít ke snížení vysokofrekvenčního šumu stanovením jeho mezní frekvence.Konkrétně můžeme nastavit mezní frekvenci digitálního filtru úpravou konfiguračního registru MPU-6050, abychom eliminovali vysokofrekvenční šum způsobený vzorkováním A/D.
Výpočet trajektorie pohybu založených na MPU-6050
MPU-6050 je šestiosý akcelerometr a senzor gyroskopu, který lze použít k měření pohybu a postoje objektů.Výpočet trajektorie pohybu na základě MPU-6050 lze realizovat následujícími kroky:
Prvním krokem je přečtení dat senzorů.Musíme si přečíst data akcelerometru a gyroskopu ze senzorů MPU-6050 pomocí příslušných ovladačů a knihovních funkcí.Tato data jsou obvykle vydávána v digitálním formátu, takže k jejich převedení na skutečná měření ve fyzických jednotkách je nutná určitá konverze a kalibrační práce.
Druhým krokem je výpočet zrychlení.Nejprve musíme zpracovat data z akcelerometru, abychom odvodili zrychlení objektu v každé ose.Následně pro výpočet rychlosti a posunutí objektu v každé ose musíme integrovat data zrychlení.V tomto procesu se často používají numerické integrační techniky, jako je Eulerova metoda nebo metoda Lunger-Kutta k zajištění přesnosti výpočtů posunu.
Třetím krokem je výpočet úhlové rychlosti.Pomocí dat gyroskopu lze vypočítat úhlovou rychlost objektu v každé ose.Tato data musí být opět kalibrována a převedena, aby se získala úhlová rychlost ve skutečných fyzických jednotkách.
Čtvrtým krokem je výpočet rotace.Integrací dat úhlové rychlosti lze vypočítat úhel rotace objektu v každé ose.To lze provést pomocí technik numerické integrace, jako je Eulerova metoda nebo metoda Longe-Kutta pro výpočet úhlu.
Pátým krokem je sloučení dat.Kombinujeme data z akcelerometrů a gyroskopů, abychom získali úplný přístup a informace o poloze objektu.To lze provést pomocí algoritmů, jako je řešič postoje založeného na kvaternionu nebo řešič úhlu Euler.
Šestým krokem je vizualizace výsledků.Převádíme trajektorii pohybu vypočteného objektu na sadu bodů ve 3D souřadnicovém systému a zobrazíme ji pomocí příslušných vizualizačních nástrojů pro intuitivnější pochopení trajektorie pohybu a postoji objektu.
Často kladené otázky [FAQ]
1. Jak přesný je MPU6050?
Získané výsledky vykazovaly dostatečnou přesnost menší než 1 % a spolehlivost, což zajišťuje správné rozměry šachty výtahu a vysoké standardy odvětví výtahu.
2. Jak číst data z MPU6050?
Chcete -li si přečíst interní registry MPU6050, Master odešle podmínku spuštění, následuje adresa I2C Slave a zápisem a poté bude přečtena adresa registru.
3. Kde se používá MPU6050?
Při nositelném sledování zdraví, zařízení pro sledování fitness.V dronech a kvadrokoptérech se MPU6050 používá pro kontrolu polohy.Používá se při kontrole robotické ramene.Zařízení pro ovládání gest rukou.
4. Je MPU6050 IMU?
Blok senzoru MPU6050 IMU čte data ze senzoru MPU-6050, který je připojen k hardwaru.Blok vydává zrychlení, úhlovou rychlost a teplotu podél osm senzoru.
5. Jaké je zpracování MPU6050?
Toto je palubní procesor MPU6050, který kombinuje data přicházející z akcelerometru a gyroskopu.DMP je klíčem k použití MPU6050 a je podrobně vysvětlen později.Stejně jako u všech mikroprocesorů potřebuje DMP firmware, aby mohl spustit.
O nás
ALLELCO LIMITED
Přečtěte si více
Rychlý dotaz
Zašlete prosím dotaz, budeme odpovědět okamžitě.

Hloubkový průvodce LM317: Porozumění nastavitelným regulátorům napětí
na 2024/09/3
Porozumění TL431: Komplexní průvodce regulátorům přesného zkratu
na 2024/09/3
Populární příspěvky
-
Co je GND v obvodu?
na 1970/01/1 3108
-

Průvodce konektorem RJ-45: barevné kódy konektoru RJ-45, schémata zapojení, aplikace R-J45, datové listy RJ-45
na 1970/01/1 2672
-
Porozumění napětí napájení v elektronice VCC, VDD, VEE, VSS a GND
na 0400/11/15 2211
-

Typy konektoru vláken: SC vs LC a LC vs MTP
na 1970/01/1 2182
-

Porovnání mezi DB9 a RS232
na 1970/01/1 1802
-

Co je to baterie LR44?
Elektřina, ta všudypřítomná síla, tiše prostupuje každý aspekt našeho každodenního života, od triviálních gadgetů po život ohrožující lékařské vybavení, hraje tichou roli.Skutečně uchopit tuto energii, zejména to, jak ji ukládat a efektivně ji vydávat, není snadný úkol.Na tomto pozadí se tento článek zaměří na typ baterie mincí, která se může zdát na pov...na 1970/01/1 1774
-
Porozumění základy: odolnost proti indukčnosti a kapacitance
Ve složitém tanci elektrotechniky se trojice základních prvků zabírá v centru pozornosti: indukčnost, odpor a kapacita.Každý nese jedinečné rysy, které diktují dynamické rytmy elektronických obvodů.Zde se vydáme na cestu, abychom dešifrovali složitost těchto komponent, abychom odhalili jejich odlišné role a praktické použití v obrovském elektrickém orchestru.Indukčnost...na 1970/01/1 1728
-

CR2430 Baterie Komplexní příručka: Specifikace, aplikace a srovnání s bateriemi CR2032
Co je baterie CR2430?Výhody baterií CR2430NormaAplikace baterie CR2430CR2430 EkvivalentCR2430 vs CR2032Velikost baterie CR2430Co hledat při nákupu CR2430 a ekvivalentůDatový list PDFČasto kladené otázky Baterie jsou srdcem malých elektronických zařízení.Mezi mnoha dostupnými typy hrají mincovské buňky klíčovou roli, běžně se vyskytují v kalkulačkách, dálkovém ovladači ...na 1970/01/1 1673
-
Co je RF a proč ho používáme?
Technologie rádiové frekvence (RF) je klíčovou součástí moderní bezdrátové komunikace, což umožňuje přenos dat na velké vzdálenosti bez fyzických připojení.Tento článek se ponoří do základů RF a vysvětluje, jak elektromagnetické záření (EMR) umožňuje RF komunikaci.Prozkoumáme principy EMR, vytvoření a kontrolu signálů RF a jejich rozsáhlé použití.Článek s...na 1970/01/1 1670
-
Komplexní průvodce HFE v tranzistorech
Tranzistory jsou klíčovými součástmi v moderních elektronických zařízeních, což umožňuje zesílení a kontrolu signálu.Tento článek se ponoří do znalostí obklopujících HFE, včetně toho, jak vybrat hodnotu HFE tranzistoru, jak najít HFE a zisk různých typů tranzistorů.Prostřednictvím našeho průzkumu HFE získáváme hlubší pochopení toho, jak tranzistoři fungují...na 5600/11/15 1632
Horké číslo dílu
-

EPM7128ELC84-20
Intel
IC CPLD 128MC 20NS 84PLCC
93LC56B-E/SN
Microchip Technology
IC EEPROM 2KBIT MICROWIRE 8SOIC
ISL88716IP826Z
Intersil
IC SUPERVISOR 1 CHANNEL 8DIP
AD7858LARZ
Analog Devices Inc.
IC ADC 12BIT SAR 24SOIC
NTR3161NT1G
onsemi
MOSFET N-CH 20V 3.3A SOT23-3
TPS53640ARSBR
Texas Instruments
IC REG CTRLR INTEL 1OUT 40WQFN
TPS62620YFFR
Texas Instruments
IC REG BUCK 1.82V 600MA 6DSBGA
CL31B153JBCNNNC
Samsung Electro-Mechanics
CAP CER 0.015UF 50V X7R 1206
70553-0002
Molex
CGRID SL SRD HDR 120 RA SR 15AU
IS34ML01G081-TLI
ISSI, Integrated Silicon Solution Inc
IC FLASH 1GBIT PARALLEL 48TSOP
XG4H-1631
Omron Electronics Inc-EMC Div
CONN RCPT 16POS 0.1 GOLD PCB
MAX6034AEXR21+T
Analog Devices Inc./Maxim Integrated
IC VREF SERIES 0.2% SC70-3
ADS5203IPFB
Texas Instruments
IC ADC 10BIT PIPELINED 48TQFP
IR4426STRPBF
Infineon Technologies
IC GATE DRVR LOW-SIDE 8SOIC
SN6501QDBVRQ1
Texas Instruments
IC XFRMR DRVR NCH 350MA SOT23-5
NFM3DCC221R1H3L
Murata Electronics
CAP FEEDTHRU 220PF 50V 1205
MAX6314US31D3+T
Analog Devices Inc./Maxim Integrated
IC SUPERVISOR 1 CHANNEL SOT143-4
DG9432DQ-T1-E3
Vishay Siliconix
IC SWITCH SPST-NCX2 30OHM 8MSOP -

LTC1440CS8#TRPBF
Analog Devices Inc.
IC COMPARATOR 1 W/VOLT REF 8SO
MCP4562T-104E/MF
Microchip Technology
IC DGTL POT 100KOHM 257TAP 8DFN
STB95N3LLH6
STMicroelectronics
MOSFET N-CH 30V 80A D2PAK
06031A4R0BAT2A
KYOCERA AVX
CAP CER 4PF 100V C0G/NP0 0603
SAC57D54HCVLT
NXP USA Inc.
IC MCU 32BIT 4MB FLASH 208LQFP
1808GC272MAT1A
KYOCERA AVX
CAP CER 2700PF 2KV X7R 1808
GRM0335C2A4R2CA01J
Murata Electronics
CAP CER 4.2PF 100V C0G/NP0 0201
LTC1152CS8#PBF
Analog Devices Inc.
IC OPAMP ZERO-DRIFT 1 CIRC 8SO
ATMEGA48A-AU
Atmel
IC MCU 8BIT 4KB FLASH 32TQFP
VI-J73-IX
Vicor Corporation
DC DC CONVERTER 24V 75W
24LC32AT-I/MNY
Microchip Technology
IC EEPROM 32KBIT I2C 8TDFN
IRF1902TRPBF
Infineon Technologies
MOSFET N-CH 20V 4.2A 8SO
AO4801
Alpha & Omega Semiconductor Inc.
MOSFET 2P-CH 8-SOIC
ICE3B1565
Infineon Technologies
IC OFFLINE SWITCH FLYBACK 8DIP
PI74STX1G79CX
Diodes Incorporated
IC SINGLE D-TYPE FLIPFLOP SC70-5
CG33.3LTR
Littelfuse Inc.
GDT 3300V 5KA 2 POLE TH
BAR46FILM
STMicroelectronics
DIODE SCHOTTKY 100V 150MA SOT23
74HC365D,653
NXP Semiconductors
IC BUFFER NON-INVERT 6V 16SO -
EP4CE6E22C8
Intel
IC FPGA 91 I/O 144EQFP
GKI03026
Sanken Electric USA Inc.
MOSFET N-CH 30V 22A 8DFN
STF16N65M2
STMicroelectronics
MOSFET N-CH 650V 11A TO220FP
JW2SN-DC5V
Panasonic Electric Works
RELAY GEN PURPOSE DPDT 5A 5V
TPS563201DDCR
Texas Instruments
IC REG BUCK ADJ 3A TSOT23-6
NS12565T7R0NN
Taiyo Yuden
FIXED IND 7UH 5.21A 19.44MOHM SM
NDD01N60-1G
onsemi
MOSFET N-CH 600V 1.5A IPAK
GRM0337U1H6R5DD01D
Murata Electronics
CAP CER 6.5PF 50V U2J 0201
MAX5550ETE+
Analog Devices Inc./Maxim Integrated
IC DAC 10BIT A-OUT 16TQFN
HR2220V801R-10
Laird-Signal Integrity Products
FERRITE BEAD 800 OHM 2220 1LN
SI7846DP-T1-GE3
Vishay Siliconix
MOSFET N-CH 150V 4A PPAK SO-8
VI-B6B-IU
Vicor Corporation
DC DC CONVERTER 95V 200W
SMCJ78CA
SMC Diode Solutions
TVS DIODE 78VWM 126VC SMC
MACH111-12JC
Lattice Semiconductor Corporation
IC CPLD 32MC 12NS 44PLCC
REF3020AIDBZT
Texas Instruments
IC VREF SERIES 0.2% SOT23-3
STGWA40M120DF3
STMicroelectronics
IGBT 1200V 80A 468W TO-247-3
NTE5244AK
NTE Electronics, Inc
DIODE ZENER 5.6V 50W DO5
SMAJ110A
Meritek
TVS DIODE 110VWM 177VC