Zkoumání mikrokontroléru ATMEGA2560
Mikrokontrolér ATMEGA2560, významný zástupce architektury AVR RISC, se slaví za svou účinnost, při provádění výkonných pokynů v rámci jediného cyklu hodin.Tento článek se ponoří do základních specifikací Atmega2560, včetně jeho rozsáhlé paměti, flexibilní konfigurace Pinaut a všestranných komunikačních protokolů, jako jsou UART, SPI a I2C.Kromě toho prozkoumáme jeho pozoruhodné vlastnosti a rozmanité aplikace, od robotiky po IoT, spolu s praktickými návrhovými poznatky pro maximalizaci jeho funkčnosti.Ať už navrhujete komplexní řídicí systémy nebo energeticky účinná řešení, tento článek poskytne znalosti pro využití plného potenciálu Atmega2560 ve vašich projektech.Katalog
Přehled ATMEGA2560
The Atmega2560 Hraje intenzivní roli jako mikrokontrolér v deskách Arduino Mega 2560, oslavující svou zdatnost při správě robustních i složitých aplikací.Funguje s architekturou založenou na AVR RISC, optimálně spojuje rychlost zpracování s úsporou energie a provádí složité příkazy v jednom cyklu hodin.Tento atribut není jen abstraktní koncept;Naopak, vývojáři jej široce vyrábějí, aby vytvořili plynule interaktivní systémy, které fungují v reálném čase.
Kromě svého strukturálního designu předvádí Atmega2560 směs rychlé provedení s vědomým využitím energie.Díky jeho obratnosti při řízení složitých úkolů z něj dělá vyhledávanou volbu pro energeticky vědomé projekty.Mnoho odborníků v oboru skutečně využilo tuto synergii, aby vymyslela schémata správy energie v gadgetech závislých na baterii, čímž podstatně prodloužila jejich funkční období bez snížení výkonu.
Široká adaptabilita Atmega2560 nachází ozvěny v různých odvětvích, jako je robotika a ekologický dohled.Jeho rozsáhlá řada integrovaných periferií zvyšuje rychlost vývoje a snižuje spoléhání se na extra hardware a uvolňuje cestou designu.Vývojáři, kteří čerpali z osobní zkušenosti, často uznávají svou flexibilitu při vytváření modulárních systémů vyžadujících škálovatelnost a rychlé prototypování;Tyto odrazy jsou obarveny jejich vlastní horlivou vášní a bystrým hodnocením.
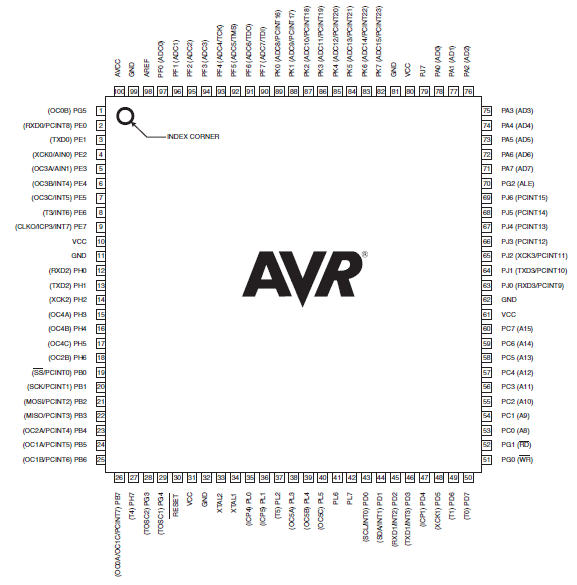
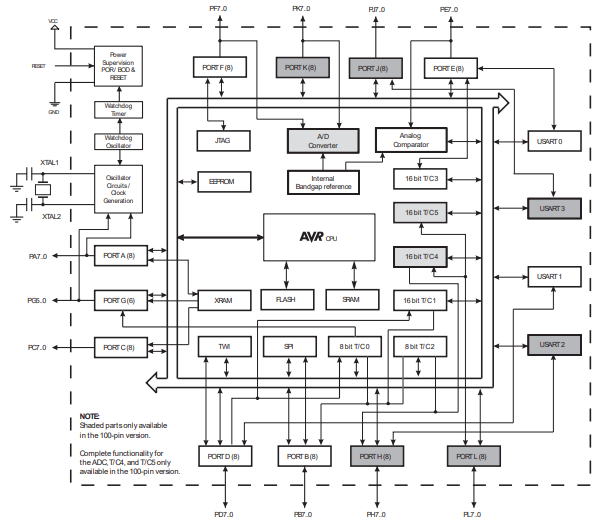
Konfigurace ATMEGA2560 PIN
|
Číslo kolíku |
Název pin |
Mapovaný název pin |
|
1 |
PG5 (OC0B) |
Digitální pin 4 (PWM) |
|
2 |
PE0 (RXD0/PCInt8) |
Digitální pin 0 (RX) |
|
3 |
PE1 (TXD0) |
Digitální pin 1 (TX) |
|
4 |
PE2 (XCK0/AIN0) |
|
|
5 |
PE3 (OC3A/AIN1) |
Digitální pin 5 (PWM) |
|
6 |
PE4 (OC3B/INT4) |
Digitální pin 2 (PWM) |
|
7 |
PE5 (OC3C/INT5) |
Digitální pin 3 (PWM) |
|
8 |
PE6 (T3/INT6) |
|
|
9 |
PE7 (CLK0/ICP3/INT7) |
|
|
10 |
VCC |
VCC |
|
11 |
GND |
GND |
|
12 |
PH0 (RXD2) |
Digitální pin 17 (RX2) |
|
13 |
PH1 (TXD2) |
Digitální pin 16 (TX2) |
|
14 |
PH2 (XCK2) |
|
|
15 |
PH3 (OC4A) |
Digitální pin 6 (PWM) |
|
16 |
PH4 (OC4B) |
Digitální pin 7 (PWM) |
|
17 |
PH5 (OC4C) |
Digitální pin 8 (PWM) |
|
18 |
PH6 (OC2B) |
Digitální pin 9 (PWM) |
|
19 |
PB0 (SS/PCInt0) |
Digitální pin 53 (SS) |
|
20 |
PB1 (SCK/PCInt1) |
Digitální pin 52 (SCK) |
|
21 |
PB2 (MOSI/PCInt2) |
Digitální pin 51 (MOSI) |
|
22 |
PB3 (MISO/PCInt3) |
Digitální pin 50 (miso) |
|
23 |
PB4 (OC2A/PCInt4) |
Digitální pin 10 (PWM) |
|
24 |
PB5 (OC1A/PCInt5) |
Digitální pin 11 (PWM) |
|
25 |
PB6 (OC1B/PCInt6) |
Digitální pin 12 (PWM) |
|
26 |
PB7 (OC0A/OC1C/PCInt7) |
Digitální pin 13 (PWM) |
|
27 |
PH7 (T4) |
|
|
28 |
PG3 (TOSC2) |
|
|
29 |
PG4 (TOSC1) |
|
|
30 |
Resetovat |
Resetovat |
|
31 |
VCC |
VCC |
|
32 |
GND |
GND |
|
33 |
Xtal2 |
Xtal2 |
|
34 |
Xtal1 |
Xtal1 |
|
35 |
PL0 (ICP4) |
Digitální pin 49 |
|
36 |
PL1 (ICP5) |
Digitální pin 48 |
|
37 |
PL2 (T5) |
Digitální pin 47 |
|
38 |
PL3 (OC5A) |
Digitální pin 46 (PWM) |
|
39 |
PL4 (OC5B) |
Digitální pin 45 (PWM) |
|
40 |
PL5 (OC5C) |
Digitální pin 44 (PWM) |
|
41 |
Pl6 |
Digitální pin 43 |
|
42 |
PL7 |
Digitální pin 42 |
|
43 |
PD0 (SCL/INT0) |
Digitální pin 21 (SCL) |
|
44 |
PD1 (SDA/INT1) |
Digitální pin 20 (SDA) |
|
45 |
PD2 (RXD1/INT2) |
Digitální pin 19 (RX1) |
|
46 |
PD3 (TXD1/INT3) |
Digitální pin 18 (TX1) |
|
47 |
PD4 (ICP1) |
|
|
48 |
PD5 (XCK1) |
|
|
49 |
PD6 (T1) |
|
|
50 |
PD7 (T0) |
Digitální pin 38 |
|
51 |
PG0 (WR) |
Digitální pin 41 |
|
52 |
PG1 (RD) |
Digitální pin 40 |
|
53 |
PC0 (A8) |
Digitální pin 37 |
|
54 |
PC1 (A9) |
Digitální pin 36 |
|
55 |
PC2 (A10) |
Digitální pin 35 |
|
56 |
PC3 (A11) |
Digitální pin 34 |
|
57 |
PC4 (A12)
|
Digitální pin 33 |
|
58 |
PC5 (A13) |
Digitální pin 32 |
|
59 |
PC6 (A14) |
Digitální pin 31 |
|
60 |
PC7 (A15) |
Digitální pin 30 |
|
61 |
VCC |
|
|
62 |
GND |
|
|
63 |
PJ0 (RXD3/PCInt9) |
Digitální pin 15 (RX3) |
|
64 |
PJ1 (TXD3/PCInt10) |
Digitální pin 14 (TX3) |
|
65 |
PJ2 (XCK3/PCInt11) |
|
|
66 |
PJ3 (PCITT12) |
|
|
67 |
PJ4 (PCInt13) |
|
|
68 |
PJ5 (PCITT14) |
|
|
69 |
PJ6 (PCITT15) |
|
|
70 |
PG2 (Ale) |
Digitální pin 39 |
|
71 |
PA7 (AD7) |
Digitální pin 29 |
|
72 |
PA6 (AD6) |
Digitální pin 28 |
|
73 |
PA5 (AD5) |
Digitální pin 27 |
|
74 |
PA4 (AD4) |
Digitální pin 26 |
|
75 |
PA3 (AD3) |
Digitální pin 25 |
|
76 |
PA2 (AD2) |
Digitální pin 24 |
|
77 |
PA1 (AD1) |
Digitální pin 23 |
|
78 |
PA0 (AD0) |
Digitální pin 22 |
|
79 |
PJ7 |
|
|
80 |
VCC |
VCC |
|
81 |
GND |
GND |
|
82 |
PK7 (ADC15/PCInt23) |
Analogový kolík 15 |
|
83 |
PK6 (ADC14/PCITT22) |
Analogový kolík 14 |
|
84 |
PK5 (ADC13/PCInt21) |
Analogový kolík 13 |
|
85 |
PK4 (ADC12/PCInt20) |
Analogový kolík 12 |
|
86 |
PK3 (ADC11/PCInt19) |
Analogový kolík 11 |
|
87 |
PK2 (ADC10/PCInt18) |
Analogový kolík 10 |
|
88 |
PK1 (ADC9/PCInt17) |
Analogový kolík 9 |
|
89 |
PK0 (ADC8/PCInt16) |
Analogový kolík 8 |
|
90 |
PF7 (ADC7/TDI) |
Analogový kolík 7 |
|
91 |
PF6 (ADC6/TMO) |
Analogový kolík 6 |
|
92 |
PF5 (ADC5/TMS) |
Analogový kolík 5 |
|
93 |
PF4 (ADC4/TCK) |
Analogový kolík 4 |
|
94 |
PF3 (ADC3) |
Analogový kolík 3 |
|
95 |
PF2 (ADC2) |
Analogový kolík 2 |
|
96 |
PF1 (ADC1) |
Analogový kolík 1 |
|
97 |
PF0 (ADC0) |
Analogový kolík 0 |
|
98 |
Aref |
Analogový odkaz |
|
99 |
GND |
GND |
|
100 |
AVCC |
VCC |
CAD model
Symbol
Stopa
3D reprezentace
Technické specifikace
Zde je tabulka pro technické specifikace, atributy, parametry a podobné části jako technologie mikročipů ATMEGA2560-16AU.
|
Typ |
Parametr |
|
Časová doba z továrny |
7 týdnů |
|
Mount |
Povrchová držák |
|
Typ montáže |
Povrchová držák |
|
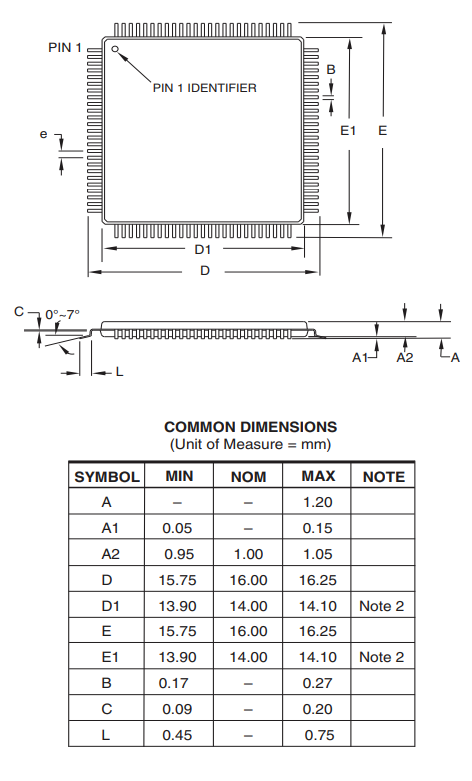
Balíček / pouzdro |
100-TQFP |
|
Počet kolíků |
100 |
|
Převaděče dat |
A/D 16x10B |
|
Počet I/OS |
86 |
|
Časovače hlídacího psa |
Ano |
|
Provozní teplota |
-40 ° C ~ 85 ° C ta |
|
Obal |
Podnos |
|
Série |
Avr® Atmega |
|
Publikováno |
2009 |
|
JESD-609 kód |
E3 |
|
Kód PBFree |
Ano |
|
Stav dílu |
Aktivní |
|
Úroveň citlivosti na vlhkost (MSL) |
3 (168 hodin) |
|
Počet zakončení |
100 |
|
Ukončení |
SMD/SMT |
|
Terminál povrch |
Matte Tin (SN) - žíhaná |
|
Další funkce |
Také pracuje při minimálním zásobování 2,7 V při 8 MHz |
|
Poloha terminálu |
Quad |
|
Terminální forma |
Gull Wing |
|
Vrcholová reflow teplota (° C) |
260 |
|
Napětí |
5V |
|
Terminální výška |
0,5 mm |
|
Frekvence |
16MHz |
|
Čas@peak reflow teplota (s) |
40 |
|
Číslo základní dílu |
Atmega2560 |
|
Provozní napájecí napětí |
5V |
|
Napájecí zdroje |
5V |
|
Rozhraní |
2-vodivo, eBi/EMI, I2C, SPI, UART, USART |
|
Velikost paměti |
256 kB |
|
Typ oscilátoru |
Vnitřní |
|
Velikost RAM |
8k x 8 |
|
Napětí - napájení (VCC/VDD) |
4,5 V ~ 5,5 V. |
|
UPS/UCS/periferní ICS typ |
MicroController, RISC |
|
Základní procesor |
AVR |
|
Periferie |
Brown-Out Detect/Reset, Por, PWM, WDT |
|
Typ programové paměti |
BLIKAT |
|
Velikost jádra |
8-bit |
|
Velikost paměti programu |
256 kB 128K x 16 |
|
Připojení |
EBI/EMI, I2C, SPI, UART/USART |
|
Bitová velikost |
8 |
|
Čas přístupu |
16 μs |
|
Má ADC |
Ano |
|
DMA kanály |
Žádný |
|
Šířka datové sběrnice |
8b |
|
Počet časovačů/čítačů |
6 |
|
Hustota |
2 MB |
|
Velikost EEPROM |
4K x 8 |
|
Počet kanálů ADC |
16 |
|
Počet kanálů PWM |
12 |
|
Počet kanálů I2C |
1 |
|
Výška |
1,05 mm |
|
Délka |
14,1 mm |
|
Šířka |
14,1 mm |
|
Dosáhnout SVHC |
Ne SVHC |
|
Kalení záření |
Žádný |
|
Stav ROHS |
Rohs3 vyhovující |
|
Olovo zdarma |
Olovo zdarma |
Funkce
|
Kategorie funkcí |
Funkce |
|
Segmenty s vysokou vytrvalostí netěkoucí paměti |
Cykly pro zápis/vymazání: 10 000 flash |
|
Podpora knihovny Atmel qtouch |
Ano |
|
Rozhraní JTAG |
IEEE STD.1149.1 Komf |
|
Periferní rysy |
Pult v reálném čase se samostatným oscilátorem |
|
Programovatelný časovač hlídacího psa se samostatným čipem
Oscilátor |
|
|
Analogový komparátor na čipu |
|
|
Přerušení a probuzení na změně špendlíku |
|
|
Další speciální funkce |
Power-On Reset a programovatelná detekce Brown-Out |
|
Interní kalibrovaný oscilátor |
|
|
Vnější a vnitřní zdroje přerušení |
|
|
Režimy spánku |
Šest režimů: Idle, redukce šumu ADC, posílení síly,
Poplnění, pohotovostní režim, rozšířený pohotovostní režim |
Aplikace
Mikrokontrolér ATMEGA2560, slavený pro své výjimečné výkonnostní schopnosti, slouží jako základ pro mnoho aplikací současných technologií.Její široké přijetí je podporováno jeho přizpůsobivostí a spolehlivostí napříč mnoha projekty a účinně řeší komplexní potřeby systému s pozoruhodnou přesností.
3D inovace tisku
V rámci 3D tiskového průmyslu hraje Atmega2560 klíčovou roli při řízení pohybu tiskáren a zajištění pečlivého umístění každé vrstvy.Jeho sofistikovaná síla zpracování řídí složité algoritmy a zaručuje vysoce kvalitní výsledky.Přesně koordinací motorových akcí a výdeje vlákna významně zvyšuje rozlišení a přesnost tisku.Často můžete využít rozsáhlé I/O kolíky mikrokontroléru pro připojení řady senzorů a motorových ovladačů, což umožňuje podrobné pohyby.Zkušenosti ukazují, že optimalizace firmwaru na míru na míru pro konkrétní 3D tiskárny může výrazně zvýšit kvalitu tisku a zkrátit dobu výroby, což zdůrazňuje flexibilní povahu mikrokontroléru.
Ovládání motoru
ATMEGA2560 nachází rozšířenou aplikaci v systémech řízení motorů, což usnadňuje provádění komplexních regulačních algoritmů pro spolehlivý výkon motoru.Poskytuje efektivní regulaci rychlosti a řízení směru, což je obzvláště výhodné v robotických a průmyslových systémech vyžadujících přesnou provozní přesnost.V praxi integrace senzorů zpětné vazby s ATMEGA2560 zvyšuje výkon nepřetržitým aktualizací provozních parametrů.Hodnota iteračního testování a kalibrace můžete často zdůraznit, abyste dosáhli vyššího řízení motoru, což vede ke zvýšené produktivitě a spolehlivosti systému.
Propojení senzoru
Pro rozhraní senzoru tvoří mikrokontrolér základ pro integraci různých analogových a digitálních senzorů, přičemž jejich data zpracovává, aby poskytovaly akční poznatky.Tato schopnost je aktivní v systémech, kde jsou shromažďování a monitorování environmentálních údajů konečné, například v meteorologických stanicích a inteligentních městech.Můžete zdůraznit výhody zdokonalování technik sběru dat a algoritmů zpracování signálu, abyste zvýšili důvěryhodnost hodnot senzorů.Tyto rafinované přístupy přispívají k rozvoji kompetentnějších a citlivějších monitorovacích systémů.
Komplexní detekce teploty
V systémech detekce teploty vyniká Atmega2560 správou řady vstupů senzorů současně a podporuje rozsáhlé skutečné tepelné monitorování.Jeho robustní schopnost zpracování zaručuje přesné hodnoty teploty, které se používají pro aplikace v systémech kontroly klimatizace a bezpečnosti.Implementace redundantních snímacích cest se často doporučuje zvýšit spolehlivost systému, což je praxe většinou prospěšná v prostředích, kde se používá teplotní stabilita.To ilustruje rovnováhu mezi inovativním inženýrstvím a praktickou spolehlivost.
Implementace chytrého domu a IoT
V doméně automatizace domácnosti a systémů IoT zmocňuje ATMEGA2560 pokročilé funkce, od regulace světel a spotřebičů až po umožnění sofistikovaných řešení pro domácí zabezpečení.Jeho prvky připojení zajišťují hladkou integraci s nejrůznějšími komunikačními protokoly a podporují soudržný ekosystém.Můžete se obhajovat pro zkoumání hybridních systémů, které používají kabelové i bezdrátové technologie k dosažení optimální rovnováhy výkonu a spolehlivosti.Tato integrace často vede k vynikajícím zážitkům a inteligentnějším obytným prostorům.
Alternativy
• • Atmega128
• • Atmega88
Schéma
Balík
Výrobce
Microchip Technology Inc., která se nachází v pulzujícím místě Chandler v Arizoně, stojí jako globálně uznávaný tvůrce špičkových řešení mikrokontrolérů.Neochvějná snaha o inovace a spolehlivost společnosti ji vyřezávala na pozoruhodné místo v konkurenčním elektronickém průmyslu.
Mikrokontroléry, příkladem společnosti Microchip Atmega2560, jsou dnes při provozu nespočetných elektronických gadgetů základní.Používá se v široké škále zařízení, jejich použití se pohybuje od základní spotřební elektroniky po složité průmyslové systémy.Tato adaptabilita je svědectvím o jejich dopadu, protože hrají hlavní roli při utváření účinnosti, výkonu a spotřeby energie zařízení.
DataSheet PDF
Datasheets ATMEGA2560-16AU:
O nás
ALLELCO LIMITED
Přečtěte si více
Rychlý dotaz
Zašlete prosím dotaz, budeme odpovědět okamžitě.
Často kladené otázky [FAQ]
1. Používá Arduino Atmega2560?
Arduino mega 2560, poháněný mikrokontrolérem ATMEGA2560, vyniká pro svou schopnost řídit složité operace, do značné míry usnadněné jeho hojnou I/O kolíky a podstatnou náčrtek.Tyto atributy nabízejí značné výhody pro úsilí, jako je 3D tisk a sofistikovaná robotika.Jeho přizpůsobivost můžete považovat za užitečnou při rozšiřování projektových schopností.Mnoho z nich zdůrazňuje, jak rozsáhlé kolíky a kapacita zpracování umožňují současnou koordinaci dat a periferní integraci, což zvyšuje složitost a dosah složitých projektů.
2. Existuje ponořovací verze Atmega2560?
Verze balíčku DIP pro Atmega2560 neexistuje, přičemž Atmega1284 je nejbližší náhradou, pokud jde o paměťovou kapacitu.Nicméně, nedosahuje I/O kolíků a sériových portů a tlačí zvážení ke kompromisům mezi velikostí a operační šířkou.Při navigaci v tomto terénu si můžete vybrat technologii povrchových montáže, která vyhovuje rozsáhlým požadavkům na I/O, navzdory jeho rozšířeným sestavovacím a opravným výzvám.
3. Jak spálím bootloader do arduino athega2560?
Nastavení bootloaderu na Atmega2560 vyžaduje konkrétní nástroje, jako je usbTinyisp a jasný postup přístupný prostřednictvím Arduino IDE.Zvládnutí této techniky je užitečné pro uvolnění úplných schopností mikrokontroléru, což umožňuje instalace personalizovaného firmwaru a maximální výkon.Často můžete pozorovat, že spolehlivá metoda instalace bootloader výrazně posiluje konzistenci vývoje a triumf projektu.
4. Jaký je nejlepší programátor ATMEGA2560?
Atmel-ice vyniká jako preferovaný nástroj pro programování a ladění mikrokontrolérů ATMEGA2560, které ocenily za svou rozsáhlou kompatibilitu se zařízeními ARM® Cortex®-M a AVR.Její síla spočívá v jeho schopnosti efektivně řešit rozmanité ladicí úkoly, čímž se usnadňuje pracovní postup vývoje.Víte, že vlastnictví programátora s vysokým kalibrem, jako je Atmel-Ice, může zvýšit ladicí účinnost a pozitivně ovlivňovat plány projektu.

TMC2208 vs. TMC2209: Který ovladač krokového je pro vás ten pravý?
na 2024/11/13

Modul Bluetooth HC-06: Aplikace, připojení Arduino a specifikace
na 2024/11/12
Populární příspěvky
-
Co je GND v obvodu?
na 1970/01/1 3162
-

Průvodce konektorem RJ-45: barevné kódy konektoru RJ-45, schémata zapojení, aplikace R-J45, datové listy RJ-45
na 1970/01/1 2737
-
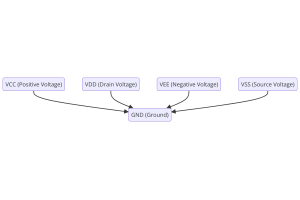
Porozumění napětí napájení v elektronice VCC, VDD, VEE, VSS a GND
na 0400/11/17 2353
-

Typy konektoru vláken: SC vs LC a LC vs MTP
na 1970/01/1 2214
-

Porovnání mezi DB9 a RS232
na 1970/01/1 1833
-

Co je to baterie LR44?
Elektřina, ta všudypřítomná síla, tiše prostupuje každý aspekt našeho každodenního života, od triviálních gadgetů po život ohrožující lékařské vybavení, hraje tichou roli.Skutečně uchopit tuto energii, zejména to, jak ji ukládat a efektivně ji vydávat, není snadný úkol.Na tomto pozadí se tento článek zaměří na typ baterie mincí, která se může zdát na pov...na 1970/01/1 1805
-
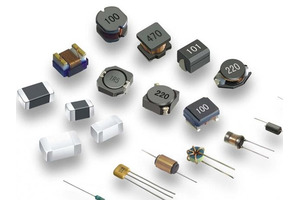
Porozumění základy: odolnost proti indukčnosti a kapacitance
Ve složitém tanci elektrotechniky se trojice základních prvků zabírá v centru pozornosti: indukčnost, odpor a kapacita.Každý nese jedinečné rysy, které diktují dynamické rytmy elektronických obvodů.Zde se vydáme na cestu, abychom dešifrovali složitost těchto komponent, abychom odhalili jejich odlišné role a praktické použití v obrovském elektrickém orchestru.Indukčnost...na 1970/01/1 1759
-

CR2430 Baterie Komplexní příručka: Specifikace, aplikace a srovnání s bateriemi CR2032
Co je baterie CR2430?Výhody baterií CR2430NormaAplikace baterie CR2430CR2430 EkvivalentCR2430 vs CR2032Velikost baterie CR2430Co hledat při nákupu CR2430 a ekvivalentůDatový list PDFČasto kladené otázky Baterie jsou srdcem malých elektronických zařízení.Mezi mnoha dostupnými typy hrají mincovské buňky klíčovou roli, běžně se vyskytují v kalkulačkách, dálkovém ovladači ...na 1970/01/1 1724
-
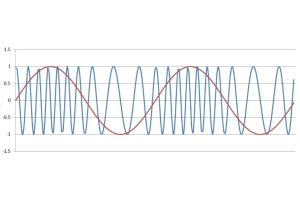
Co je RF a proč ho používáme?
Technologie rádiové frekvence (RF) je klíčovou součástí moderní bezdrátové komunikace, což umožňuje přenos dat na velké vzdálenosti bez fyzických připojení.Tento článek se ponoří do základů RF a vysvětluje, jak elektromagnetické záření (EMR) umožňuje RF komunikaci.Prozkoumáme principy EMR, vytvoření a kontrolu signálů RF a jejich rozsáhlé použití.Článek s...na 1970/01/1 1713
-
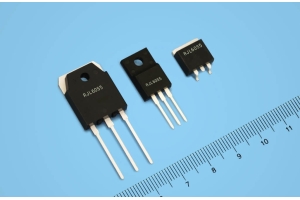
Komplexní průvodce HFE v tranzistorech
Tranzistory jsou klíčovými součástmi v moderních elektronických zařízeních, což umožňuje zesílení a kontrolu signálu.Tento článek se ponoří do znalostí obklopujících HFE, včetně toho, jak vybrat hodnotu HFE tranzistoru, jak najít HFE a zisk různých typů tranzistorů.Prostřednictvím našeho průzkumu HFE získáváme hlubší pochopení toho, jak tranzistoři fungují...na 5600/11/17 1683
Horké číslo dílu
-

TNPW06032K70BEEA
Vishay Dale
RES 2.7K OHM 0.1% 1/10W 0603
3SMBJ5936B-TP
Micro Commercial Co
DIODE ZENER 30V 3W DO214AA
LTC2053HMS8#PBF
Analog Devices Inc.
IC OPAMP ZERO-DRIFT 1 CIRC 8MSOP
CY2305SI-1H
Infineon Technologies
IC FANOUT BUFFER 8SOIC
TPS566238RQFR
Texas Instruments
3-V TO 18-V INPUT, 6-A SYNCHRONO
VI-J6B-CX
Vicor Corporation
DC DC CONVERTER 95V 75W
843246BGILFT
Renesas Electronics America Inc
IC CLK/FREQ SYNTH 24TSSOP
DEA252450BT-2134B1
TDK Corporation
RF FILTER BAND PASS 2.45GHZ 1008
GRM0335C1E7R8DA01D
Murata Electronics
CAP CER 7.8PF 25V C0G/NP0 0201
RC2512FK-073R65L
YAGEO
RES 3.65 OHM 1% 1W 2512
P4SMA13CA
Eaton - Electronics Division
TVS DIODE 11.1VWM 18.2VC SMA
IW1706-01
Renesas Design Germany GmbH
IC OFFLINE SW FLYBACK SOT23-5
1N3910R
Solid State Inc.
DO5 30 AMP FAST RECOVERY RECTIFI
BLM21BD421SN1D
Murata Electronics
FERRITE BEAD 420 OHM 0805 1LN
LTC6242IDHC#TRPBF
Analog Devices Inc.
IC CMOS 4 CIRCUIT 16DFN
NCP803SN293D3T1G
onsemi
IC SUPERVISOR 1 CHANNEL SOT23-3
TL1963A-15DCYT
Texas Instruments
IC REG LINEAR 1.5V 1.5A SOT223-4
CC0402KRX7R7BB393
YAGEO
CAP CER 0.039UF 16V X7R 0402 -
S-35390A-J8T1U
ABLIC Inc.
IC RTC CLOCK/CALENDAR I2C 8SOP
MCP2022A-500E/ST
Microchip Technology
IC TRANSCEIVER HALF 1/1 14TSSOP
BAS21W_R1_00001
Panjit International Inc.
DIODE GEN PURP 200V 200MA SOT323
ADS7884SDBVT
Texas Instruments
IC ADC 10BIT SAR SOT23-6
MM3Z36VT1G
onsemi
DIODE ZENER 36V 300MW SOD323
MAX207EWG
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 5/3 24SO
LM2576T-ADJ
onsemi
IC REG MULT CONFG ADJ 3A TO220-5
SMCJ6.5A
SMC Diode Solutions
TVS DIODE 6.5VWM 11.2VC SMC
SMBJ5.0A
Bourns Inc.
TVS DIODE 5VWM 9.2VC SMB
BCM5720A0KFBG
Broadcom Limited
IC ETHERNT ADAPT PCI EXP 169FBGA
A3983SLP-T
Allegro MicroSystems
IC MTR DRV BIPOLR 3-5.5V 24TSSOP
HMJ212BB7473KGHT
Taiyo Yuden
CAP CER 0.047UF 100V X7R 0805
REF6125IDGKR
Texas Instruments
IC VREF SERIES 0.05% 8VSSOP
STB10N65K3
STMicroelectronics
MOSFET N-CH 650V 10A D2PAK
MC74VHC08DR2
onsemi
IC GATE AND 4CH 2-INP 14-SOIC
AC1210KKX7R9BB104
YAGEO
CAP CER 0.1UF 50V X7R 1210
744032004
Würth Elektronik
FIXED IND 4.7UH 490MA 280MOHM SM
TA1232A
TST
SAW FILTER, SM3030-6PAD, 2655.00 -
LM158AH/883
Texas Instruments
IC OPAMP GP 2 CIRCUIT TO99-8
AD7945BRSZ
Analog Devices Inc.
IC DAC 12BIT A-OUT 20SSOP
PCA9507D
NXP USA Inc.
2-WIRE SERIAL BUS EXTENDER FOR H
74AC244PC
onsemi
IC BUFFER NON-INVERT 6V 20DIP
BGS13S2N9E6327XTSA1
Infineon Technologies
IC RF SWITCH SP3T 3GHZ TSNP9-3
LP5951MF-1.8
Texas Instruments
IC REG LINEAR 1.8V 150MA SOT23-5
GRM55D7U3A822JW31L
Murata Electronics
CAP CER 8200PF 1KV U2J 2220
PC123P
Sharp Microelectronics
OPTOISOLATR 5KV TRANSISTOR 4-SMD
P9235A-0NDGI8
Renesas Electronics America Inc
IC WIRELESS PWR 40-VFQFPN
1SMA200Z R3G
Taiwan Semiconductor Corporation
DIODE ZENER 200V 1.25W DO214AC
1N3309RB
Microchip Technology
DIODE ZENER 10V 50W DO5
3314G-1-202E
Bourns Inc.
TRIMMER 2K OHM 0.25W GW TOP ADJ
CC3200R1M1RGCR
Texas Instruments
IC RF TXRX+MCU WIFI 64VFQFN
P4SMA9.1A
Taiwan Semiconductor Corporation
TVS DIODE 7.78VWM 13.4VC DO214AC
WSL2816R0100FEH
Vishay Dale
RES 0.01 OHM 1% 2W 2816
M-FIAM7BM21
Vicor Corporation
DC FRONT END MODULE 9-PIN HALF-B
SN74ALVC164245KR
Texas Instruments
IC TRANSLTR BIDIRECTIONAL 56BGA
XC2VP70-5FFG1517C
AMD
IC FPGA 964 I/O 1517FCBGA